comptadors - exemple 3: control per a un servomotor
Un servomotor és un motor amb circuiteria de realimentació que li permet posicionar-se amb gran precisió en una posició fixa. El control es realitza amb un únic fil que reb un pols d'amplitud variable a una freqüència d'uns 50 Hz. El pols va des d' 1 ms (eix del motor a un costat) fins a 2 ms (eix del motor a l'altre costat), éssent el punt mig (amb un pols d' 1.5ms) el punt en el què l'eix del motor queda en posició intermitja.
En aquest exemple s'emprarà el comptador 1 en mode PWM amb control de fase i període per a controlar dos servomotors. S'utilitzaran, per tant, els dos comparadors del comptador. Es funcionarà amb els següents paràmetres:
Nota: l'exemple s'ha fet amb ATmega128 (només canvia l'adreça d'interrupció per overflow) i és funcional.
| .INCLUDE "m128def.inc" .DEF srri = R10 .DEF temp = R16 .DEF pols1ms = R17 .ORG 0x0 rjmp inici .ORG 0x1C ;0x08 en ATmega8 rjmp cnt1_iovf1 inici: ldi temp,LOW(RAMEND) out SPL,temp ldi temp,HIGH(RAMEND) out SPH,temp ser temp ; out PORTC, temp ; out PORTD, temp out DDRB, temp clr temp out PORTB, temp ldi pols1ms, 31 ldi temp, (1<<COM1A1)|(1<<COM1B1) out TCCR1A, temp ldi temp, (1<<WGM13)|(1<<CS12) out TCCR1B, temp ldi temp, (1<<TOIE1) out TIMSK, temp ldi temp,0x02 out ICR1H,temp ldi temp,0x71 out ICR1L,temp ldi temp,0 out OCR1AH,temp out OCR1AL,pols1ms out OCR1BH,temp out OCR1BL,pols1ms sei main: nop rjmp main cnt1_iovf1: in srri, SREG in temp, PINC andi temp, 0x1F add temp, pols1ms out OCR1AL, temp in temp, PIND andi temp, 0x1F add temp, pols1ms out OCR1BL, temp out SREG, srri reti |
; CONTROL DE DOS SERVOMOTORS ; PROGRAMA FUNCIONAL AMB ATMEGA128 (2 SERVOS: sortides OC1A i OC1B) ; Autor: Joan Oliver ; Universitat Autònoma de Barcelona ; ; Aplicació amb Timer1 ; El timer s'empra en mode de PWM amb correcció de fase i període, TOP en ICR1 ; S'empra un comparador per cada servomotor ; El prescaler es posa a 256 => 16MHz/256 => periode=16us ; Un període, 20ms, implica un compteig de 1250/2 (mode de doble rampa)=0x271 ; El pols d'1ms dura 62.5 compteigs, i es centra en el overflow (en el 0, de -31 a 31 compteigs) ; Pel pols d'1.5ms es suma 31.25 al valor 62.5 -> pols de -47 a +47 compteigs ; I pel pols de 2ms=125compteigs el pols va de -62.5 a +62.5 compteigs ; L'increment/decrement de cada motor s'entra pels PINC i PIND (5 primers bits - fins a 31) ; Les sortides PWM estan en OC1A (PORTB.1) i OC1B (PORTB.2) ; guarda de registre de status ; registre temporal ; registre guarda temps 1 ms ; rutina d'inici del programa ; rutina servei int'timer1'ovf ;-------INICI PROGRAMA ----------------------------------------------- ; inicialitzar stack out SPL,temp ldi temp,HIGH(RAMEND) out SPH,temp ser temp ; PORTC entrada amb pull-up ; PORTD entrada amb pull-up ; PORTB com a sortida ; PORTB sortida a zero ; inicialització pols 1ms ;-------SETUP CNT1---------------------------------------------------- ; WGM13:0 = 8 --> PWM amb correció de fase i període i TOP en ICR1 ; COM1x1:0 = 1 --> OC1x commutant en commutació; =2 ->clear upcounting, set downcounting ; AMB TOSC= 16MhZ --> Prescaler a 256 ; interrupció per overflow en TOP ;-------INICIALITZACIÓ MOTORS----------------------------------------- ; inicialització ICR1 ; inicialització OCR1A ;-------PROGRAMA PRINCIPAL-------------------------------------------- ; tornar a programa principal ; subrutina tractament overflow: ; actualitzar pols servo A ; actualitzar pols servo B |
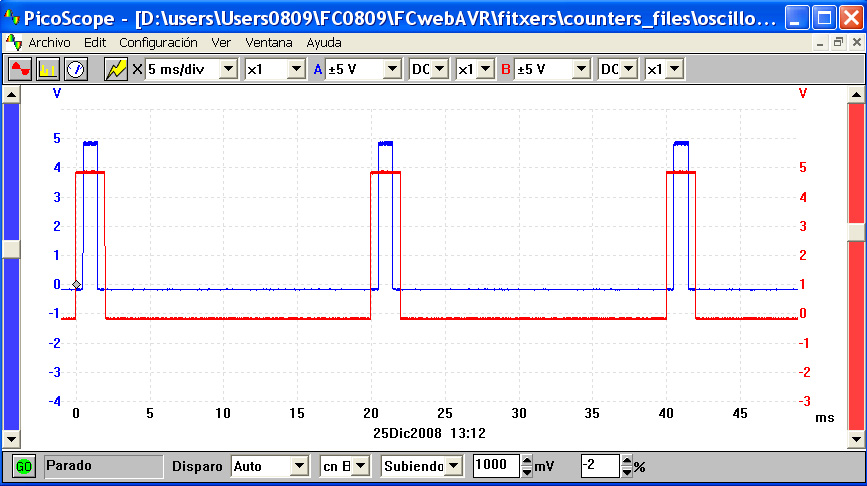
La següent figura mostra el resultat obtingut en l'oscil·loscop. S'observen els dos canals, ambdós a una freqüència de 50Hz, el vermell amb un pols de 2ms i el canal blau d'1 ms.