Control d'un motor pas a pas
El control d'un motor pas a pas es realitza controlant la fase en la que es troba. Les fases s'entren al motor a través dels fils que tenen. Per exemple, el motor V9728, model 440-420 es controla (figura 1) a partir de 6 fils, 4 d'ells corresponents a les fases A, noA, B i noB. El color del fil en marca la fase.
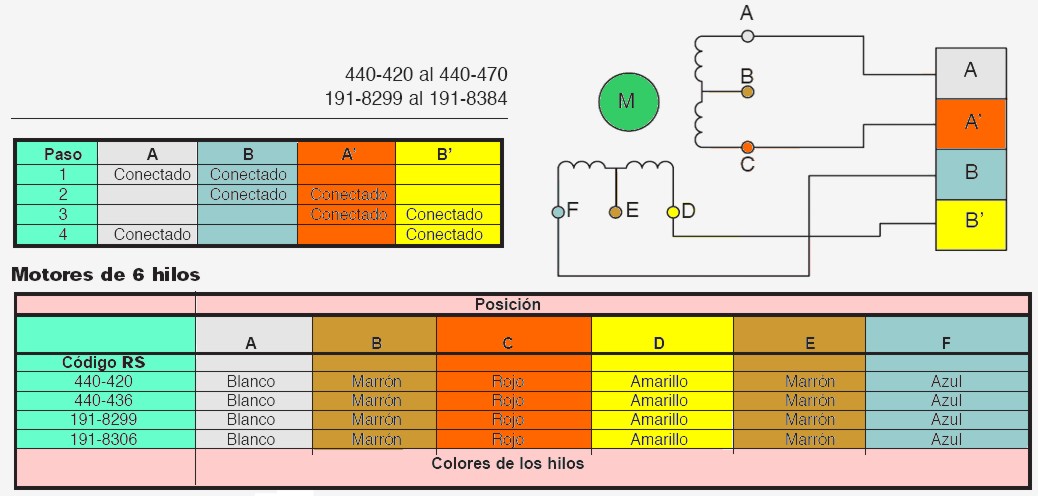
Figura 1. Taula de valors de les fases d'un motor pas a pas.
En el codi que es proposa l'activació de les fases es fa jugant amb els valors emmagatzemats en un regsitre de desplaçament. Els valors de les fases (parella (A,B)) es posen en el registre, en el format ((0,0), (0,1), (1,1), (1,0)). Desplaçant 2 valors de cop cap a la dreta dóna sortida al canvi de fase CCW, i si es fa cap a l'esquerra, es té el canvi de fase CW.
L'algorisme que es presenta implementa el control del motor pas a pas seguint aquest esquema (figura 2).

Figura 2. Codificació de les fases en el registre
Concretament,
- El registre rg s'inicialitza amb els valors descrits. Els pins 7 i 6 corresponen a les fases A i B, i els pins 3 i 2 a les fases noA i noB.
- La temporització s'ha posat a 10Hz i es porta a terme amb el timer1 en mode CTC per comparació en A. A cada interrupció es fan dos desplaçaments del registre rs donant sortida a les fases.
- El sentit de gir es fa amb el PINB.7. A 1-lògic el motor gira CW, a 0-lògic CCW.
.INCLUDE "m128def.inc" .DEF srri = R10 .DEF zero = R12 .DEF temp = R16 .DEF sr = R17 .ORG 0x0 rjmp inici .ORG 0x18 rjmp int_cmp1A inici: ldi YH, HIGH(RAMEND) ldi YL, LOW(RAMEND) out SPH, YH out SPL, YL ser temp out DDRB, temp sbi DDRD, 5 sbi PORTD, 7 ldi temp, 0b00011110 mov sr, temp clr zero ldi temp, (1<<WGM12)|(1<<CS12) out TCCR1B, temp ldi temp, high(6250) out OCR1AH, temp ldi temp, low(6250) out OCR1AL, temp ldi temp, (1<<OCIE1A) out TIMSK, temp sei main: nop rjmp main int_cmp1A: in srri, SREG out PORTB, sr sbic PIND, 7 rjmp dreta lsl sr adc sr, zero lsl sr adc sr, zero rjmp final dreta: lsr sr brcc u ori sr, 0b10000000 u: lsr sr brcc final ori sr, 0b10000000 final:out SREG, srri reti | ; CONTROL MOTOR
PAS A PAS |