UABot és un robot educatiu dissenyat de forma que pugui ser personalitzat per a cada aplicació. Es basa en una plataforma oberta sobre microcontrolador que permet realitzar l'interconnexionat que es desitgi d'acord amb l’aplicació a realitzar.
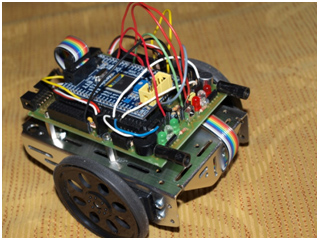
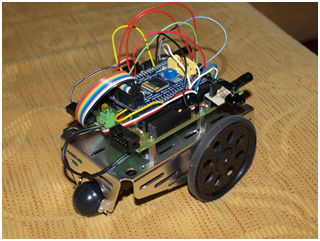
La facilitat de personalització de l'UABot està estretament lligada amb la versatilitat del processador que utilitza. Està basat en el microcontrolador de la casa Atmel, l’ ATmega128. La figura següent mostra la disposició dels components sobre el robot.
 |
 |
Les principals característiques del robot són:
- Detector davanter d’obstacles. Consta de dos emissors d’IR i un receptor d’IR amb filtre de 38KHz. Permet detectar un objecte que es col·loqui al davant del robot fins a una distància de 50 cm.
- Detector d’obstacle per costat. Té una parella emissor/receptor d’IR en cada costat que poden ser emprats com a detectors d’obstacle pels costats. Donat que s’empra una entrada analògica, pot detectar des de molt a prop fins a 20 cm.
- Disposa de dos sensors de llum, un a cada costat. Tenen una construcció en RC que permet que, no només puguin detectar valors discrets de canvi de llum, sinó que també pugui ser avaluat la temporització en el que es realitza un canvi d’il·luminació.
- Té un detector de línia compost per 4 sensors d’IR a prop disposats pel seguiment de línia i detecció de punts d’encreuament. La seva construcció permet detectar la línia des de mig centímetre fins a dos centímetres de distància.
- Disposa de leds de visualització d’acció. Es poden personalitzar segons l’ús que se’n vulgui fer.
- La motricitat del robot pot ser realitzada per servomotors com per motors DC. En el cas d’emprar servomotors s’ha previst un connector de tres pins (propi dels servomotors) per a cada servomotor. Si es desitja controlar el robot amb motors DC s’ha preparat la placa base per a col·locar un circuit en pont en H que permeti fer el control del robot per PWM.
- La placa base del robot conté un circuit MAX232 que permet establir fins a 2 canals de comunicació sèrie RS232 full-dúplex amb el robot. També s’ha previst un connector de 20 terminals al que se li acobla directament el circuit Bluemore200 de la casa Eikon que permet establir la comunicació amb un host emprant Bluetooth. Així el funcionament del robot es pot controlar directament des d’un PC sense necessitat d’estar-hi acoblat per fil.
- Conté un piezzobuzzer i un micròfon amb circuiteria de preamplificació que li permeten fer tasques de seguiment de so.
- El robot es pot programar pel port paral·lel, emprant el connector ISP que porta la placa ETAVR, i emprant JTAG, mitjançant el port que s’ha preparat en la placa.
- El robot pot ser alimentat des de 5V fins a 10V. Porta dos terminals diferents de connexió d’alimentació i internament té un regulador de baixa caiguda de tensió a 5V. S'ha previst poder introduir opcionalment un regulador de 3.3V (o el que es desitgi) per a components alimentats a diferent tensió.
- La pròpia disposició de la placa permet personalitzar de forma fàcil el funcionament del robot segons la funcionalitat que se li vulgui aplicar.
El microcontrolador ATmega128 que s’empra ve ja muntat sobre una placa ET-AVR funcionant a una freqüència base de rellotge de 16MHz. Entre les principals característiques d’aquest microcontrolador cal anomenar:
- Fins a 54 ports d’entrada/sortida, tots ells compartits amb altres entrada/sortida dels components interns de què consta el microcontrolador.
- Té dos timers de 8 bits i dos de 16 bits, amb possibilitat de generar fins a 8 senyals PWM, totes elles multiplexades en ports d’entrada/sortida. Els timers poden produir interrupció per overflow i per comparació amb registres comparadors interns. A més, tots els timers disposen de prescaler amb valors programables (fins a 8 valors predeterminats) entre 1 i 1024.
- Disposa d’un conversor analògic/digital que pot multiplexar fins a 8 entrades d’un port d’entrada/sortida.
- Té un comparador analògic que permet ser emprar com a trigger.
- Disposa de dos ports USART per a la transmissió i recepció de senyal sèrie emprant el protocol RS232.
- Es pot programar emprant el programador ISP (port paral·lel) mitjançant un protocol MISO, o bé es pot emprar un programador que empra el port JTAG (per un port sèrie o pel port USB). El programador JATG també es pot emprar com a depurador. Cal tenir en compta que el programador JTAG empra 4 línies del port analògic.
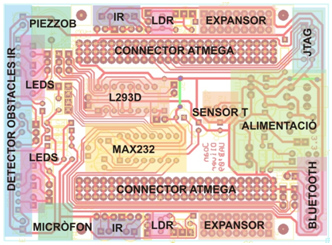
La figura mostra la distribució dels principals components sobre la placa base del robot. En els expansors ATmega s’hi connecta el microcontrolador. A cada pin del microcontrolador li correspon una expansió de 3 pins de l'expansor, el que permet personalitzar fàcilment el funcionament del robot en cada aplicació.
El robot està pensat com a robot educatiu per a ser emprat en diferents vessants de l'ensenyament de la informàtica:
- Com a robot simple permet ser personalitzat de forma fixa per a poder ser emprat en entorns de secundària. En aquest cas la seva major utilitzat està en verificar les seves capacitats sensorials i motrius amb l’esperit que l’alumne entengui les funcions bàsiques dels components que configuren el robot.
- La filosofia del robot està pensada clarament per a què cobreixi un gap important que hi ha a nivell universitari, i en especial en enginyeries de l’àrea de les TIC. Quan s’analitzen aquestes titulacions es veu un gap important en la connexió entre els coneixements que s’imparteixen en matèries software i hardware. Els fonaments dels computadors i els algorismes i programació i estructura de dades són matèries independents en les que els professors poc incideixen en el nucli comú que els lliga, la programació a baix nivell. El fet que el robot permeti ser programat tant a nivell assemblador com a alt nivell (en C) fa que pugui ser un element clau en la impartició d’aquestes assignatures sota un ABP comú que agrupi aquestes matèries.
- I inclús a un nivell superior, la construcció del robot permet la introducció d’un sistema operatiu simple (un FreeRTOS) en el microcontrolador de forma que el robot pot actuar sota la supervisió d’un sistema operatiu en temps real.
- A nivell ja de recerca, la pròpia mida del robot fa que es pugui emprar en estudis de comportaments socials basats en microrobots o bé que se’l pugui emprar en camps com ara la intel·ligència artificial per a realitzar accions més pròpies de la recerca.